Mini Sumo are small autonomous robots that fight in an arena called a Dohyo. This
is a circular arena 77cms in diameter painted matt black with a 2.5cm white circle
painted around the outside edge. There are two parallel brown start lines (Sikiri-Sen)
10cms long and 1 cm wide which are positioned 5 cms either side of the centre. The
robots can be equipped with sensors that enable it to locate the opponent so it
can push it from the arena. The robot will normally have edge sensors to avoid driving
out of the arena. The mini Sumo must weigh a maximum of 500 gms and when in its
start position sit completely within a 10cm square but with no height restrictions.
Each robot should have a start button that when pressed gives a 5 second delay before
combat begins to enable the starters to get out of sensor range. The looser is the
first robot to exit the dohyo.
|
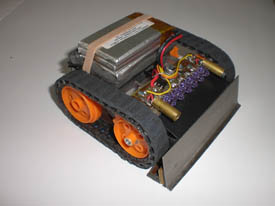
Drive |
25mm motor/gearbox 120rpm |
|
Wheels |
Catapilla Tracks Sticky Rubber |
|
Opponent Sensors |
6 Pulsed IR LED's / 2 IR Photo Transistors |
|
Edge Sensors |
Reflective Sensors SY-CR102 |
|
Battery |
12.6 V 1000mah 15C Lithium Polymer
|
|
Weight |
499 gms |
|
Processor |
Atmega48 |
|
Software |
Assembler |