I have developed an updated controller using a small microprocessor based (ATtiny24)
system using two TB6612 dual motor driver chip for Antweight Robots.
This
controller supercedes all previous ranges and includes an internal DSM2
compatible receiver.(Lemon Rx)
The motor drive boards can drive two of the standard microgearbox motors using a
2 or 3 cell lipo battery, four standard microgearbox motors using 2 cell lipo
battey or two of the HP or 12v microgearbox motors using a 2
cell lipo battery.
See
here for approved
motor table.
I no longer offer to make controllers for other people and would recommend the
Nano Two controllers which are both smaller and cheaper than mine were.
For
details see
Data
The controller includes the Lemon DSM2 compatible receiver and so the unit is
only compatible with DSM2 transmitters such as DX6i, DX5e, MLP4DSM but not the
DX6.
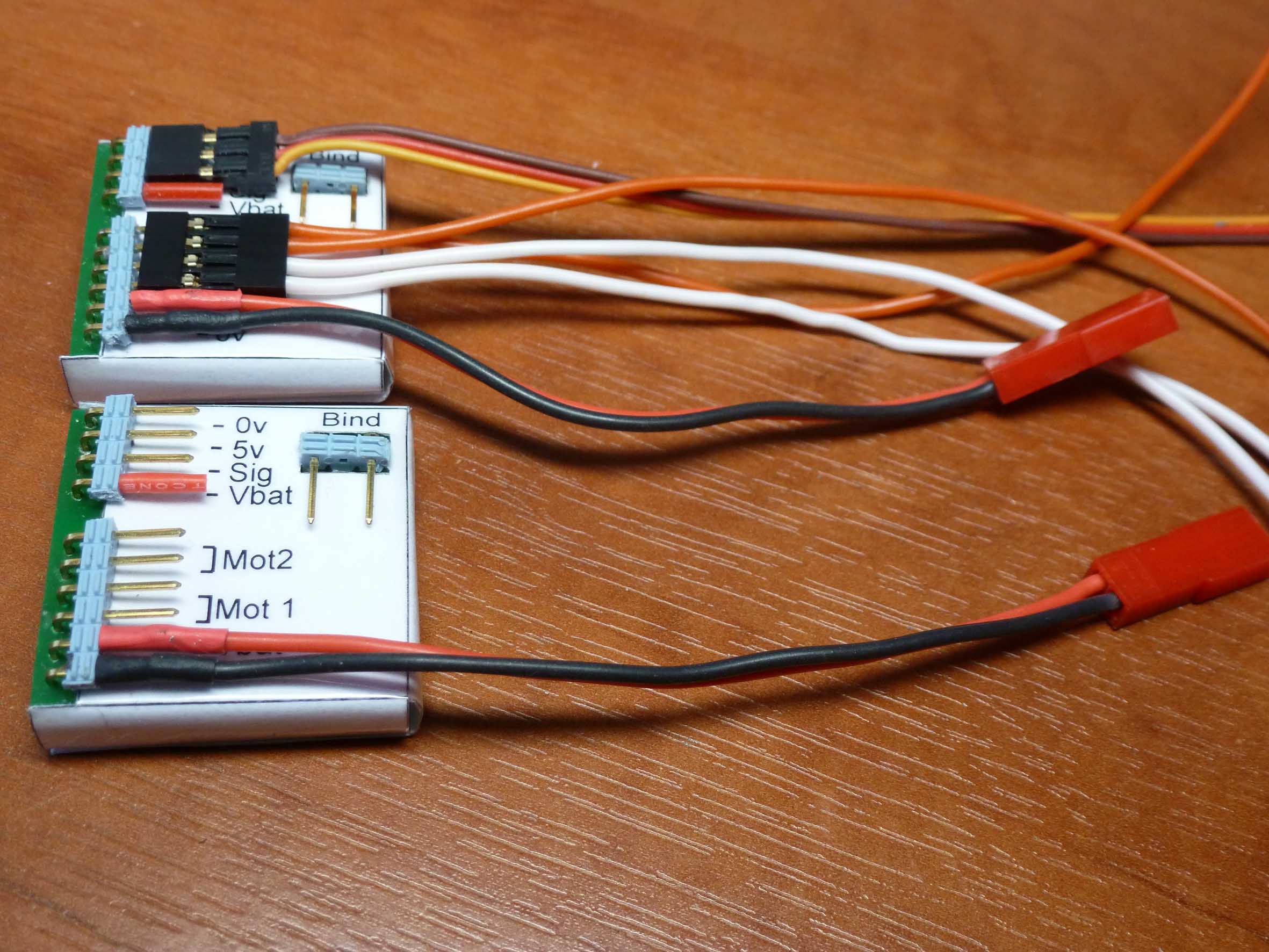
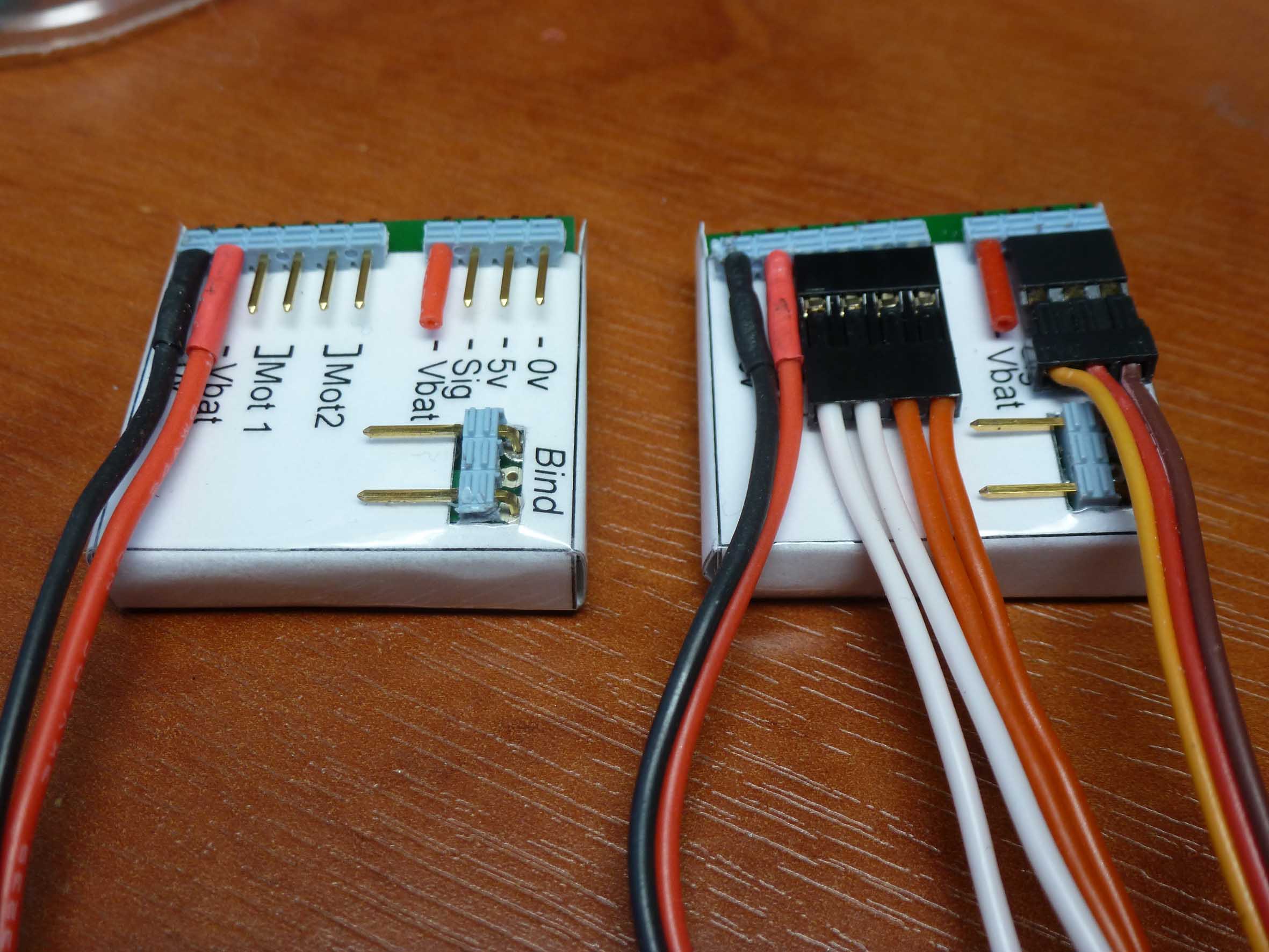
The unit is 32 x 32 x 10.5mm and weighs 8.5 gms including the power lead and
connector with a further 2.2 gms for the motor loom which is supplied.
It has a 5v BEC capable of supplying up to 1.5A on two cells and drive /
steering mixing is built in.
This is elev/ail mixing so single stick operation on mode2 tranmitters and drive
on the left and steering on the right on mode1.
There is a 4 pin connector for the third channel, the first 3 pins take a
standard servo connector and the 4th pin sleeved in red brings out the full
battery voltage for high voltage servos.
A standard 2 pin connector is available for the bind link and a link is supplied
with each unit.
The motor drive is 2.4 Amps continuous on both outputs and the controller is
rated for driving the following:
2 high power motors or 4 standard motors on two cells or two standard motors on
three cells.