Speed Controllers
I have developed a range of small microprocessor based (ATtiny44) speed
contoller using the TB6612 dual motor driver chip for Antweight Robots. Because
of the cost and complexity of approvals testing I am unable to sell these
commercially. I am prepared to make them, at a reasonable cost, on a one off
prototype basis for friends who are fellow antweight enthusiasts. Besides
offering two drive channels these controllers provide a 5v regulated supply for
the receiver and weapon servo.
Because servos can have very different power requirements I have done testing with the
following servos.
Saturn62, SuperTec HP Naro, Futaba FD33M, SuperTec S136L, Spektrum S75, Hitec HS81, HoBao H-101,
PARK HPX F.
Option A controllers work with all but the PARK HPX F servo but all other controllers will work with
all the listed servos.
There is also a compatibility issue with the Corona receivers as they output the
different channel signals simultaneously and not sequentially as with normal
receivers.
The motor drive boards can drive two of the standard microgearbox motors using a
2 or 3 cell lipo battery or two of the HP or 12v microgearbox motors using a 2
cell lipo battery. See
here for approved
motor table
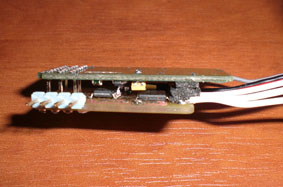
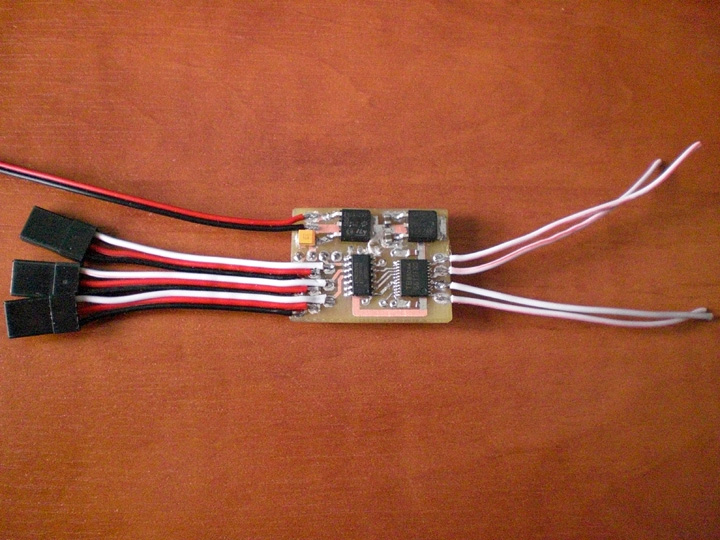
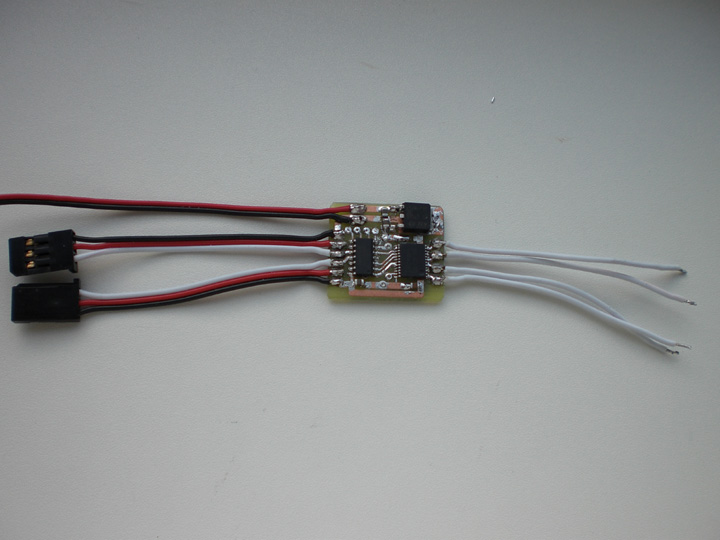
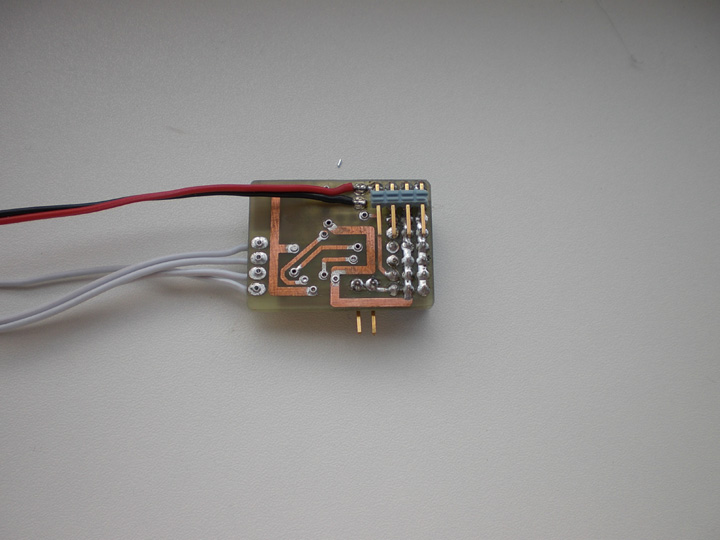
Option A Board
This board provides a basic two motor speed controller that plugs into the
receiver on two flying leads. It provides +5v to power the receiver and any one
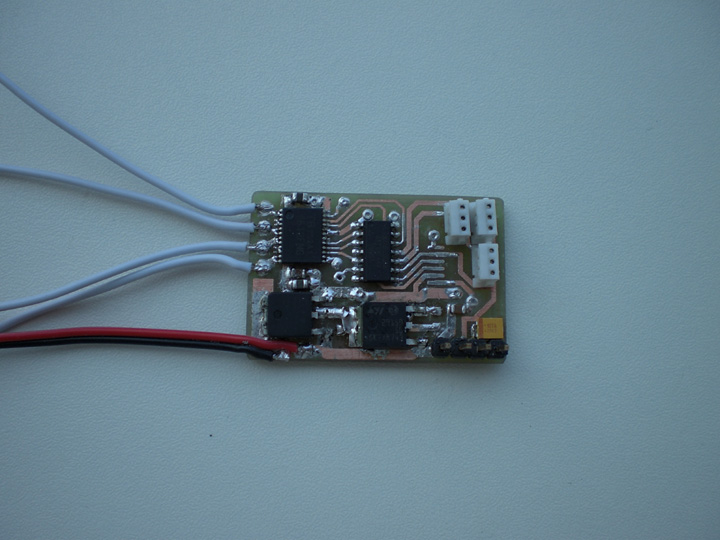
servo in the list above apart from the Park HPX F. The board is 26.5 x 22.5 mm
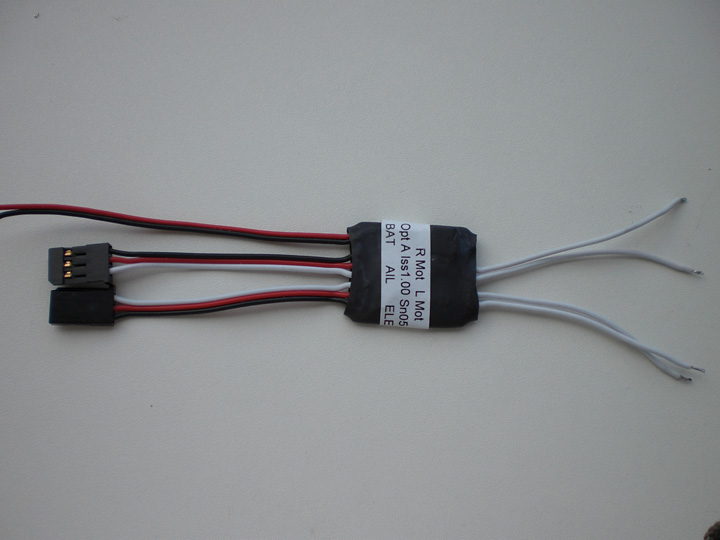
and weighs 6.2gms as in the first picture or when fitted with a heat shrink
case and label as shown in the second picture 28.5 x 24 mm and 7.2 gms.
Option B Board
The option B boards are designed to work with the Spektrum 2.4 Ghz receivers and
have sockets mounted on them so the receivers plug straight into the controller
boards reducing the number of wires, size and weight.
Option B-61 for AR6100 Receiver.
This board has a 3 x 7 way socket that the AR6100 receiver plugs straight into.
Because the AR6100 receiver has a large capacitor on board it has been possible
to design the board to work with all the tested servo's including the Park HPX F
with a single 1.5A regulator. The board is 24 x 32 mm and weighs 7.4 gms with
leads or 29 x 35 mm and 8.5 gms with heat shrink case. The output to the weapon
servo is brought out on a 4 way plug. The first 3 pins are the standard servo
connections but the 4th is the battery +ve. This enables, by use of a 4 way
header supplied with the board, the servo to be powered directly from the
battery supply. Two other pins are brought out to enable the receiver to be
bound a transmitter while plugged into the controller using a link also
supplied. The servo plug can be optionally mounted on the reverse side of the
board as shown in the 3rd picture. This allows the AR6000 receiver to be plugged
in to the board.
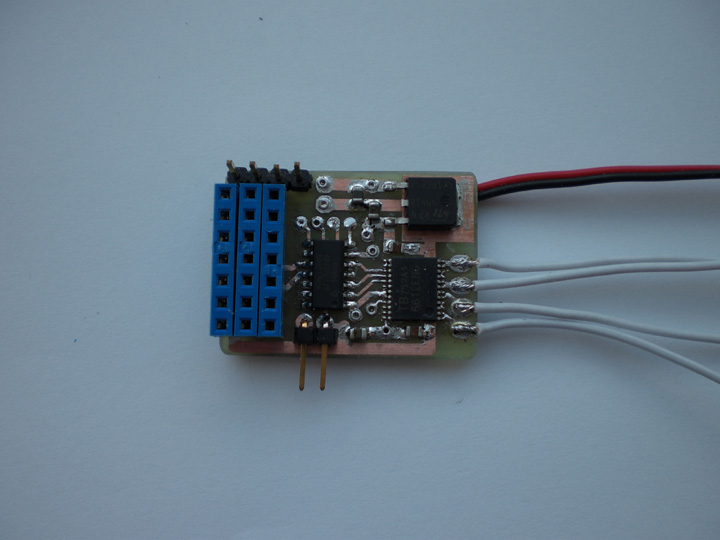
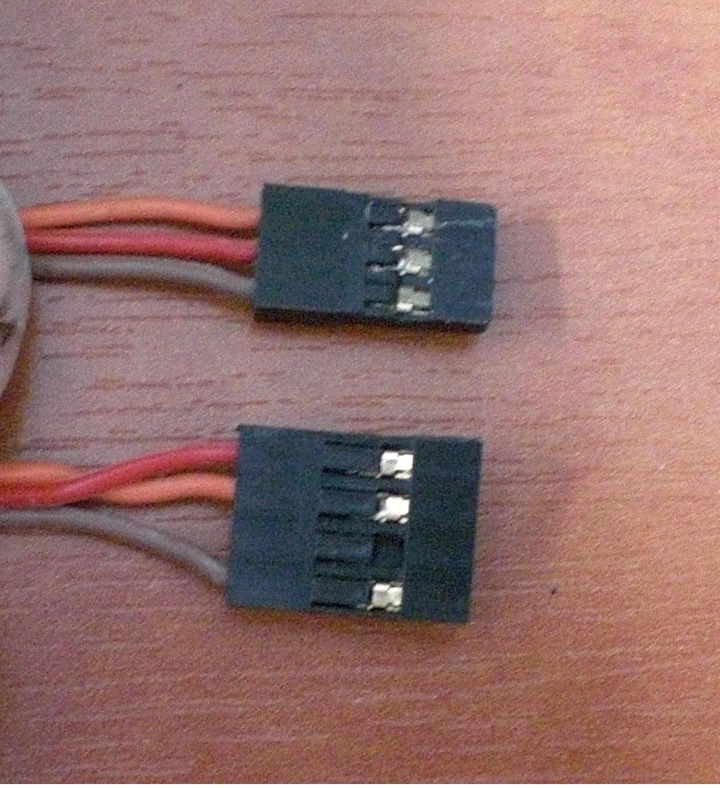
Option B-63 for AR6300 Receiver.
This board has 3 x 3 way sockets that the AR6300 receiver plugs straight into.
Because the AR6300 receiver has no large capacitor on board a second
regulator has been added to supply the servo separately enabling the board to
work with all the tested servo's including the Park HPX F. The board is 24 x
36.5 mm and weighs 7 gms or 29 x 40 mm and 8gms with heat srink case. The ouput
to the weapon servo is brought out on a 4 way plug. The first 3 pins are the
standard servo connections but the 4th is the battery +ve. This enables, by use
of a 4 way header supplied with the board, the servo to be powered directly from
the battery supply. The 3rd picture shows the standard servo socket and the
supplied header with the servo pins inserted.
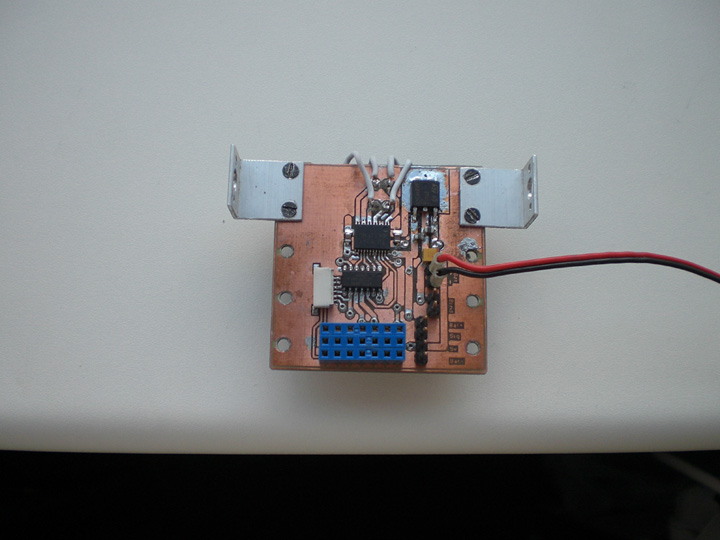
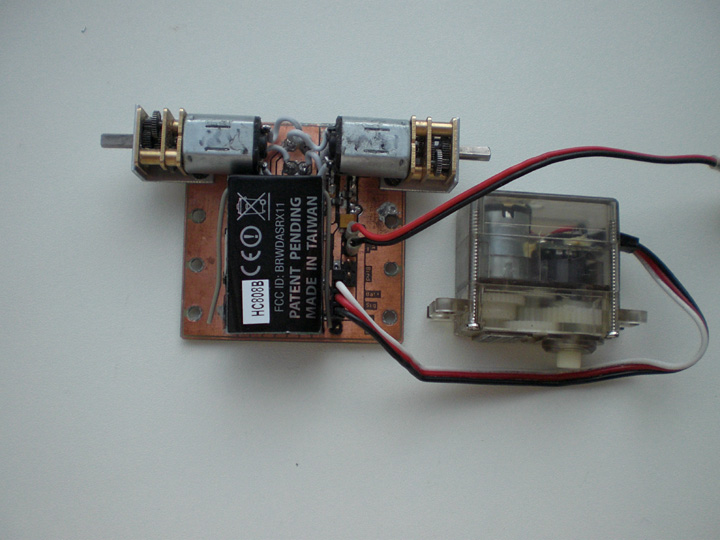
Option C Board
This board has a 3 x 7 way socket that the AR6100 receiver plugs straight into.
Because the AR6100 receiver has a large capacitor on board it has been possible
to design the board to work with all the tested servo's including the Park HPX F
with a single 1.5A regulator. The board is 47 x 47 mm and weighs 17 gms with
leads, motor mount brackets and screws and an all up weight with receiver and
motor gearboxes of 37 gms . The idea is that this board forms the chassis of the
robot and six further mounting holes are included to assist with mounting armour
and weapons. The ouput to the weapon servo is brought out on a 4 way plug. The
first 3 pins are the standard servo connections but the 4th is the battery +ve.
This enables, by use of a 4 way header supplied with the board, the servo to be
powered directly from the battery supply. Two other pins are brought out to
enable the receiver to be bound to a transmitter while plugged into the
controller using a link also supplied. The servo plug can be optionally mounted
on the reverse side of the board allowing the AR6000 receiver to be plugged in
to the board.
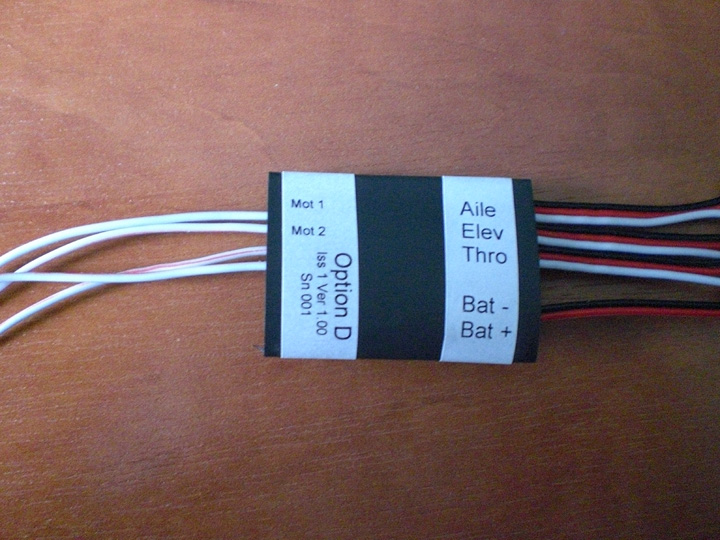
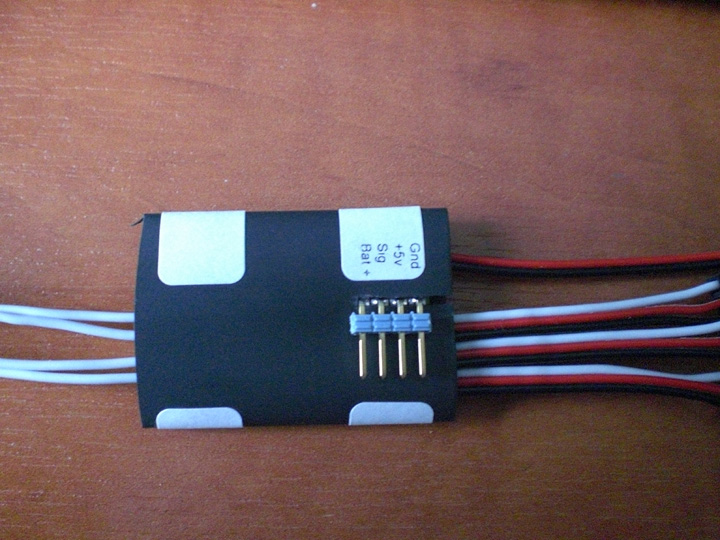
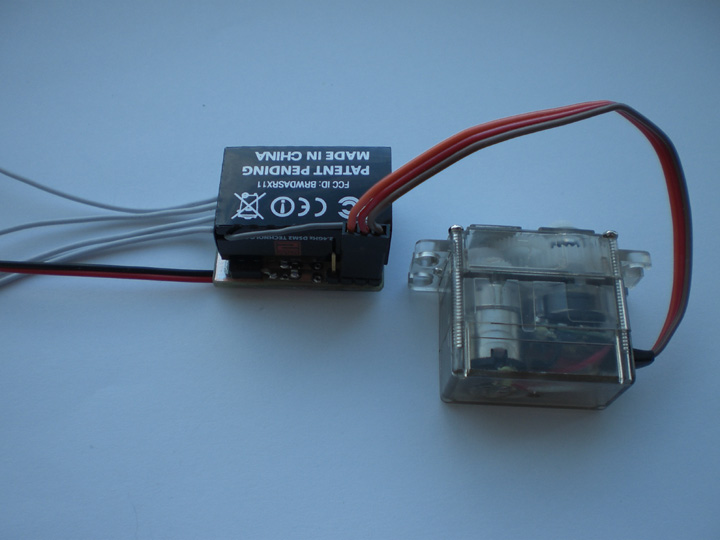
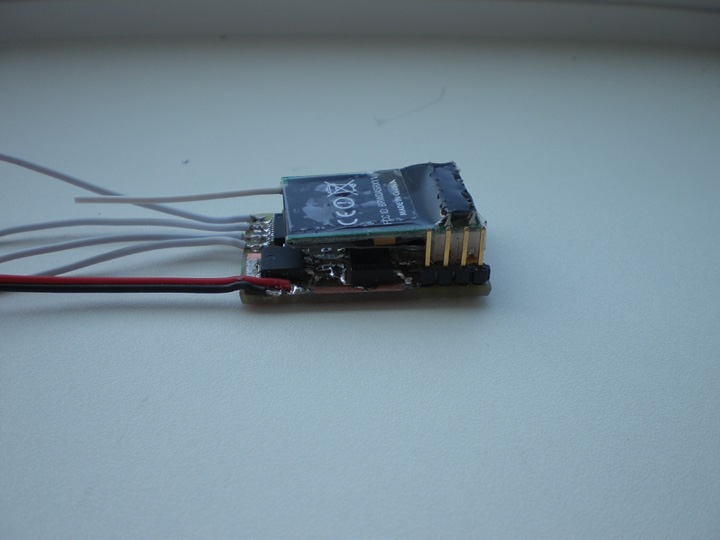
Option D Board
Planet T5 Compatible Module
Because the Planet R6M receiver size and form didn't fit with the existing
Options I decided on a different approach. By removing most of the receiver's
connector and replacing the large electrolytic capicitor I was able to solder
the modified receiver to a speed controller board and come up with a complete
module that was smaller than the receiver on it's own.
This module provides a basic two motor speed controller with mixing. It works
with all the tested servo's and has the 4 pin servo plug giving the option for
full battery voltage to run the servo. The module is 42 x 26 x 9 mm and weighs 10.2
gms.